Операция “Квадрокоптер”. День первый. Выбор компонентов
Date December 31st, 2013 Author Vitaly Agapov
 Постройка какого-нибудь мультикоптера в наше время превратилась из чисто гиковского (и весьма сложного) занятия почти в мейнстрим с почти нулевым к тому же порогом вхождения. Поэтому не будет здесь никаких открытий и прочей уникальной информации. Просто рассказ о том, как далёкие от темы люди делают свой собственный летательный аппарат. В нашем случае это будет классический X-образный квадрокоптер эконом-класса. Так сказать, разведка боем.
Постройка какого-нибудь мультикоптера в наше время превратилась из чисто гиковского (и весьма сложного) занятия почти в мейнстрим с почти нулевым к тому же порогом вхождения. Поэтому не будет здесь никаких открытий и прочей уникальной информации. Просто рассказ о том, как далёкие от темы люди делают свой собственный летательный аппарат. В нашем случае это будет классический X-образный квадрокоптер эконом-класса. Так сказать, разведка боем.
Само собой, путь в тысячу ри начинается с одного шага. А в нашем случае этим шагом является выбор компонентов для коптера, сопряжённый с чтением мегабайтов текстов (форумов, документаций и прочего) и рассматриванием витрин зарубежных (в основном – китайских) интернет-магазинов.
Дальнейший выбор обусловлен несколькими факторами:
- Чайниковостью автора;
- Желанием сэкономить, борющимся с желанием сделать получше;
- Стремлением делать заказы в минимально возможном количестве магазинов.
Отбросив описание душевных метаний, сообщу, что в качестве доноров были выбраны магазины www.rctimer.com и www.hobbyking.com. Оба они базируются в Китае и более того – в Гон-Конге. Так что неудивительно, что посылки в итоге пришли от них одновременно.
Полётный контроллер
Выбор железок стоит начинать именно с основной платы. Тут не то, чтобы полное, но вполне себе раздолье на разные вкусы и уровни платёжеспособности, начиная с бюджетных MultiWii и КК и заканчивая дорогими MicroKopter и DJI Naza.
 Полётный контроллер – это мозг коптера. Он обеспечивает управление аппаратом и его стабилизацию в воздухе. Именно к нему подключаются все внешние датчики, приёмники, передатчики и контроллеры моторов. В общем, важная штука. Более подробное описание типичных функций и сравнение реализаций можно посмотреть в вики.
Полётный контроллер – это мозг коптера. Он обеспечивает управление аппаратом и его стабилизацию в воздухе. Именно к нему подключаются все внешние датчики, приёмники, передатчики и контроллеры моторов. В общем, важная штука. Более подробное описание типичных функций и сравнение реализаций можно посмотреть в вики.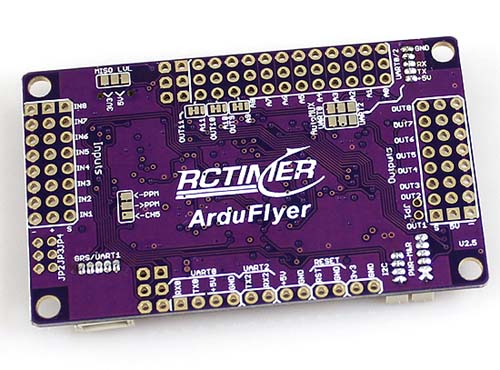
Я, как любитель всего с открытым исходным кодом, сразу сделал выбор в пользу контроллера ArduCopter. Это прошивка для Arduino, обладающая всеми (и даже чуть больше) фичами, которые могут понадобиться. Он даже умеет управлять подвесом для камеры (вернёмся к этому позже). Официально платы с под эту прошивку выпускает контора 3D Robotics и называет их ArduPilot Mega (APM). Они чрезвычайно хороши, но весьма дороги. Поэтому замечательно, что на свете есть китайцы, которые могут делать почти не хуже и намного дешевле. В частности они делают клон APM под названием ArduFlyer и продают его на RCTimer'е. Тот же форм-фактор, та же прошивка, те же гироскопы, акселерометры, компасы и барометры. Отличие лишь в том, что ArduFlyer продаётся нераспаянным и без пластмассового корпуса (впрочем, похоже, что и эти недостатки китайцы уже устранили), но на что не пойдёшь ради экономии в сотку баксов…
Моторы
 Выбор полётного контроллера практически никак не влияет на выбор остальных компонентов, чего не скажешь о многих других деталях, например, тех же моторах. Их нужно выбирать в связке с пропеллерами и ESC (контроллерами скорости).
Выбор полётного контроллера практически никак не влияет на выбор остальных компонентов, чего не скажешь о многих других деталях, например, тех же моторах. Их нужно выбирать в связке с пропеллерами и ESC (контроллерами скорости).
Для рассчётов параметров этой "силовой установки" коптера существует специальный калькулятор.
Но, грубо говоря, основными характеристиками мотора являются: масса мотора, мощность, потребляемый максимальный ток и параметр KV, обозначающий количество оборотов мотора на холостом ходу на кажый вольт входного напряжения. И найти подходящий баланс может быть нелегко. Хочется больше мощности? Плати большей массой и большим током, который потянет за собой более дорогие ESC и более дорогую и тяжёлую батарею.
Что касается KV, то здесь всё чуть менее прозрачно. Обычно для пропеллеров поменьше размером выбирают моторы с большим числом KV и наоборот. Понятно, что ставить 12-дюймовые пропеллеры на мотор с 4000KV не стоит, так как скорее всего их просто разнесёт еа куски.
Я же выбрал на том же RCTimer'е бесколлекторные моторы 2830/11 1000KV. Для квадрокоптера их нужно 4 штуки плюс один про запас. Плюс до кучи адаптеры для пропеллеров для этой серии моторов. Их особенность заключается в том, что они крепятся на корпусе мотора четырьмя винтами, а не зажимаются на гладком валу (shaft) с помощью гайки, как штатные проп-адаптеры. В общем, выглядят гораздо надёжнее.
ESC
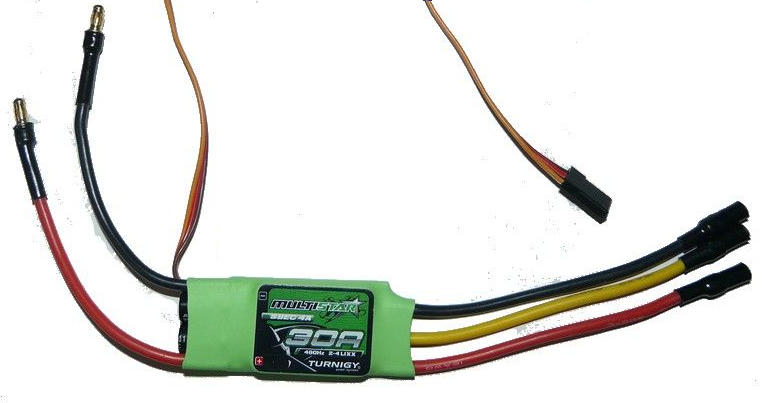 Electronic Speed Controller – это устройство для управления оборотами электродвигателя. У него кроме массы две важные характеристики: максимальный ток и наличие BEC (Battery Elimination Circuit). Раз в характеристиках мотора указан максимальный ток в 30А (это скорее всего с большим запасом), то и ESC нужно брать 30-амперный. BEC нам понадобится, если мы хотим запитать полётный контроллер от ESC. В противном случае нам понадобится либо отдельная батарея на 5В, либо отдельный элемент (UBEC), понижающий напряжение 12В с батареи до 5В для питания платы.
Electronic Speed Controller – это устройство для управления оборотами электродвигателя. У него кроме массы две важные характеристики: максимальный ток и наличие BEC (Battery Elimination Circuit). Раз в характеристиках мотора указан максимальный ток в 30А (это скорее всего с большим запасом), то и ESC нужно брать 30-амперный. BEC нам понадобится, если мы хотим запитать полётный контроллер от ESC. В противном случае нам понадобится либо отдельная батарея на 5В, либо отдельный элемент (UBEC), понижающий напряжение 12В с батареи до 5В для питания платы.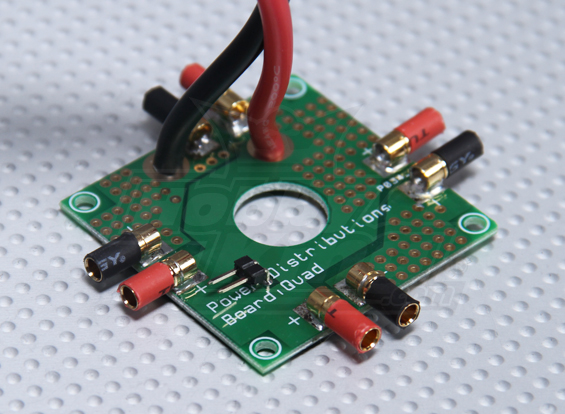
Мой вариант – это Turnigy Multistar от Hobbyking. Это простое устройство на базе платы ATMega. У него два входа типа male-bullet для подключения к аккумулятору, три выхода типа female-bullet для подключения к мотору и один трёхконтактный серво-коннектор для подключения к полётному контроллеру. Один из этих контактов – сигнальный, два других – пресловутый BEC на 5.5В.
Для удобного распределения питания от батареи я ещё заказал Power Distribution Board. Другой вариант – это простой харнесс (может быть даже самодельный), но с платой всё должно получиться аккуратнее.
Пропеллеры
Пропы стоят дёшево, к тому же к ним все относятся как к расходному материалу, поэтому этого добра мы заказали много и разных размеров. В частости, такие вот 11-дюймовые экземпляры. Главное – смотреть, чтобы в наборе было по два разнонаправленных пропеллера, так как вращаться они будут в разных направлениях.
Рама
 Это самый интересный пункт программы. Люди с наиболее прямыми руками, у которых место произрастания этих рук наиболее близко к эталону (то есть к плечам), делают рамы самостоятельно из алюминиевого профиля и прочих подручных материалов. Остальным же можно выбирать готовые варианты из того огромного количества, что предлагают интернет-магазины.
Это самый интересный пункт программы. Люди с наиболее прямыми руками, у которых место произрастания этих рук наиболее близко к эталону (то есть к плечам), делают рамы самостоятельно из алюминиевого профиля и прочих подручных материалов. Остальным же можно выбирать готовые варианты из того огромного количества, что предлагают интернет-магазины.
Для нашего оборудования и 11-дюймовых пропеллеров наиболее адекватной кажется рама с размахом в 55 см. Дальше – чистое творчество. Хочется минимальной массы и простоты монтажа. Хочется углепластика. В общем, выбор пал на карбоновый Turnigy Talon V2. Его масса в 280 г радует, но не радует маленькая площадь рабочей поверхности, усложняющая установку оборудования. После ряда полевых испытаний можно будет сказать о раме что-нибудь конкретное.
Батарея
 Батареи обладают рядом важных характеристик, которые нельзя упускать из виду. Рассмотрим их по порядку.
Батареи обладают рядом важных характеристик, которые нельзя упускать из виду. Рассмотрим их по порядку.
Масса и ёмкость
Очень коррелирующие характеристики, делающие задачу нахождения оптимума нетривиальной. Ясно, что увеличение ёмкости приведёт к увеличению массы аппарата и, как следствие, к увеличению тока, необходимого для поддержания коптера в воздухе. Нужно либо поиграться с калькулятором, либо обратиться к теоретическим исследованиям. Есть например такая вот статья, в которой вычисляется, что максимальное время полёта достигается при массе батареи, составляющей 87% от массы аппарата без батареи.
Интерфейс
Обычно харнессы и платы распределения питания идут с разъёмом male-XT60. Соответственно интерфейс разрядки батареи должен быть female-XT60. Бывают варианты с 4mm-bullet, которые придётся перепаивать или искать переходники.
Напряжение
11.1В
Ячейки и ток разряда
Также связанные характеристики. Чем больше банок (ячеек) у батареи, тем больший ток она может отдавать. Но и тем больше у неё обычно масса (и цена) при той же ёмкости. Обычно в описании ESC указывается, какое количество банок должно быть у батареи, и в нашем случае там написано 2-4S LiPoly, То есть от 2 до 4-х банок нам подойдёт. Банки соединяются последовательно, поэтому чем их больше, тем меньше напряжение на кажой банке. То есть 11.1 В получается как сумма напряжений на всех банках.
 Ток разряда обозначается в величинах "С" и обычно в характеристиках указывают постоянный рабочий ток разряда и ток во всплесках (burst). 1C – это такой ток разряда, при котором ёмкость в 1Аh разряжается за один час. То есть максимальный отдаваемый ток можно получить как произведение ёмкости батарем в ампер-часах на эту величину. И этот ток должен быть больше тока, потребляемого всем оборудованием коптера (хотя всем кроме моторов с их ESC можно пренебречь).
Ток разряда обозначается в величинах "С" и обычно в характеристиках указывают постоянный рабочий ток разряда и ток во всплесках (burst). 1C – это такой ток разряда, при котором ёмкость в 1Аh разряжается за один час. То есть максимальный отдаваемый ток можно получить как произведение ёмкости батарем в ампер-часах на эту величину. И этот ток должен быть больше тока, потребляемого всем оборудованием коптера (хотя всем кроме моторов с их ESC можно пренебречь).
 Вот к примеру такая вот батарея на 5000mAh с током разряда 20C (burst 30С) может постоянно выдавать ток в 100А в пике до 150А. А это значит, что коптер сможет летать на полном газу с максимальной подъёмной силой.
Вот к примеру такая вот батарея на 5000mAh с током разряда 20C (burst 30С) может постоянно выдавать ток в 100А в пике до 150А. А это значит, что коптер сможет летать на полном газу с максимальной подъёмной силой.
В завершение разговора о батарее можно упомянуть такую вот полезную штучку. Это датчик напряжения батареи, который подключается к её контрольному интерфейсу JST-XH. Он сигнализирует о низком напряжении с помощью звука (очень притом громкого – в квартире его лучше не втыкать) и светодиодов.
Для зарядки литий-полимерных батарей понадобится зарядное устройство. Вполне может подойти Turnigy Accucel-6 c 12-вольтовым блоком питания.
Аппаратура и приёмник
 Аппа – это то, чем мы будем управлять квадрокоптером. Просто для того, чтобы полетать, достаточно 4-х радиоканалов. Это 3 угла Эйлера (рыскание – yaw, тангаж – pitch, крен – roll), а также газ – throttle. Но для реализации разных крутых штук каналов понадобится гораздо больше. Так что выбирать надо аппы 8-9-канальные.
Аппа – это то, чем мы будем управлять квадрокоптером. Просто для того, чтобы полетать, достаточно 4-х радиоканалов. Это 3 угла Эйлера (рыскание – yaw, тангаж – pitch, крен – roll), а также газ – throttle. Но для реализации разных крутых штук каналов понадобится гораздо больше. Так что выбирать надо аппы 8-9-канальные.
Известные профессиональные аппы – это Futaba и JR. Но одной из самых популярных (и, наверное, самой дешёвой в своём классе) является аппа Turnigy 9x на 9 каналов. Правда, к ней идёт 8-канальный приёмник, и логика такого комплекта ясна мне не вполне.
Питается передатчик от восьми батареек AA, но их можно заменить вот таким вот аккумулятором. Приёмник питается от напряжения 5В. Возможно, его можно запитать от контроллера, но на всякий случай я заказал для него отдельный UBEC.
GPS
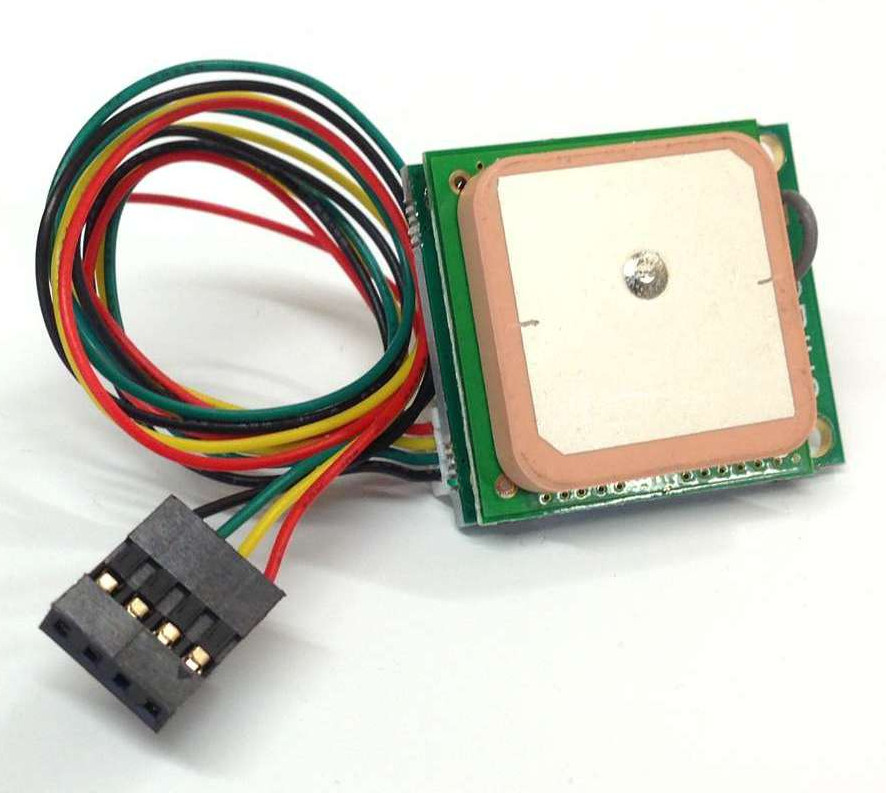 Минимальный набор мы уже набрали, но до кучи пригодится ещё GPS модуль. Он пригодится для управления через телеметрию, слежения, полётам по контрольным точкам, а также для возврата на базу. Я заказал модуль Neo-6M.
Минимальный набор мы уже набрали, но до кучи пригодится ещё GPS модуль. Он пригодится для управления через телеметрию, слежения, полётам по контрольным точкам, а также для возврата на базу. Я заказал модуль Neo-6M.
Остальное
Кроме всего вышеперчисленного нужно заказать россыпь всякого остального барахла: термоусадки разных калибров, коннекторы, трёхконтактные серво-кабели, липучки, винтики, гайки, втулки, проставки. Само собой ещё разных няшек на будущее: набор для телеметрии, OSD и прочее, о чём расскажу отдельно. А ещё запчастей для рамы.
На этом пока всё. Завтра будем собирать.
Ссылки
- Официальная страница Arducopter: https://code.google.com/p/arducopter/wiki/APM2RC
- Калькулятор: http://rc-calc.com/ru/copter/s63r5Y
- Подробное обсуждение мозгов: http://forum.rcdesign.ru/f123/thread263519.html
Tags: Beyond IT, R/C
Category:
R/C |
4 Comments »
28 January 2015 - 13:14
Виталий подскажите, сколько в итоге вышло по стоимости компонентов? примерно)
28 January 2015 - 13:30
По тогдашнему курсу рубля это вышло во что-то около двадцати тысяч.
30 January 2015 - 8:47
добрый день. хочу тоже по вашим наброскам собрать коптер. а как быть с авто удержанием высоты?
можно ли это реализовать в данном контроллере?
Заранее спасибо.
30 January 2015 - 11:27
У ArduPilot есть такой полётный режим как AltHold. Он нужен именно для этого – поддержания высоты. Об этом есть немного в статье "День третий. Настройка"