Операция “Квадрокоптер”. День второй. Сборка
Date January 8th, 2014 Author Vitaly Agapov
 Сборка квадрокоптера состоит из двух условных процессов. Первый процесс подразумевает соединение компонентов нужными интерфейсами и в нужной последовательности. Второй процесс (менее технологичный, но более творческий) заставляет решать, как разместить всё на маленькой площади, закрепить и как проложить провода. Эти процессы идут параллельно, то входя в конфронтацию вплоть до полной блокировки, то помогая друг другу.
Сборка квадрокоптера состоит из двух условных процессов. Первый процесс подразумевает соединение компонентов нужными интерфейсами и в нужной последовательности. Второй процесс (менее технологичный, но более творческий) заставляет решать, как разместить всё на маленькой площади, закрепить и как проложить провода. Эти процессы идут параллельно, то входя в конфронтацию вплоть до полной блокировки, то помогая друг другу.
Так как второй процесс весьма индивидуален и сильно зависит от конкретной рамы и конкретной реализации, начнём именно с него.
Компоновка
Итак, мы собрали раму (если имел дело хотя бы с парой конструкторов Лего в своей жизни, то трудностей здесь не будет) и стали словно мартышка из известной басни прикладывать к ней моторы, контроллеры, платы и прочие приёмники с целью определения наилучшей эргономики. Само собой, слово "эргономика" не звучало, а заменялось на более подходящие случаю фразы типа "как же эту фиговину приделать к этой штуковине".
 Изначально одним из факторов, повлиявших на выбор именно этой рамы, было желание аккуратно проложить провода к моторам внутри лучей, а не снаружи. Соответственно ESC нужно было разместить на центральной площадке, в не прикрутить стяжками к лучам. Это, конечно же, сэкономило бы кучу места и нервов, но выглядело бы более кустарно. К счастью, "метод мартышки из басни" показал, что все четыре ESC прекрасно размещаются прямо между пластинами центральной площадки у оснований лучей. И даже остаётся немного места для размещения UBEC'а. Эпитет "прекрасно" относится исключительно к этому этапу, так как этап подключения продемонстрировал, что кроме самих ESC нужно расположить ещё 20 не самых тонких проводов от этих ESC (по пять на брата) плюс 12 не самых тонких проводов от моторов (по три на брата).
Изначально одним из факторов, повлиявших на выбор именно этой рамы, было желание аккуратно проложить провода к моторам внутри лучей, а не снаружи. Соответственно ESC нужно было разместить на центральной площадке, в не прикрутить стяжками к лучам. Это, конечно же, сэкономило бы кучу места и нервов, но выглядело бы более кустарно. К счастью, "метод мартышки из басни" показал, что все четыре ESC прекрасно размещаются прямо между пластинами центральной площадки у оснований лучей. И даже остаётся немного места для размещения UBEC'а. Эпитет "прекрасно" относится исключительно к этому этапу, так как этап подключения продемонстрировал, что кроме самих ESC нужно расположить ещё 20 не самых тонких проводов от этих ESC (по пять на брата) плюс 12 не самых тонких проводов от моторов (по три на брата).
Штатные провода питания моторов очень коротки, что-то около 10 см. Нам же нужно было прокинуть их до центра коптера, где уже уютно расположились ESC. Поэтому их банановые (bullet) коннекторы пришлось откусить, припаять удлинители из обычного медного кабеля 1.5 мм толщиной, а на их концы напаять новые золочёные bullet-коннекторы и аккуратно украсить их термоусадкой.



Сами моторы аккуратно привинчиваются на свои площадки на концах лучей. Правда, так как штатные проп-адаптеры отправились на свалку, а для новых ось не нужна, эту ось пришлось аккуратно отпилить дремелем. Впрочем, и для штатных адаптеров эту ось полезно было бы укоротить.
С помощью металлических втулок над верхней центральной площадкой закрепили плату распределения питания. При этом под ней осталось довольно приличное пространтсво примерно в 2 см, которое можно использовать для расположения дополнительного оборудования – телеметрии, видеопередатчика и т.д.
На плату сверху положили радиоприёмник таким образом, чтобы контакты его смотрели в сторону того створа, который будет передней частью коптера, а нумерация каналов шла слева направо. Всё это нужно для удобного подключения каналов к полётному контроллеру.
Сверху приёмник прижали дополнительной углепластиковой пластиной, закрепив её длинными винтами, вкрученными во втулки платы распределения питания. В этой плате предварительно были обычным шуруповёртом со сверлом по металлу высверлены отверстия для крепежа ArduFlyer'а. В эти отверстия вставляются нейлоновые крепежи, снизу на плате они фиксируются самостопорящимися гайками с пластиковыми вставками, а сверху плата будет прихватываться нейлоновыми винтами.


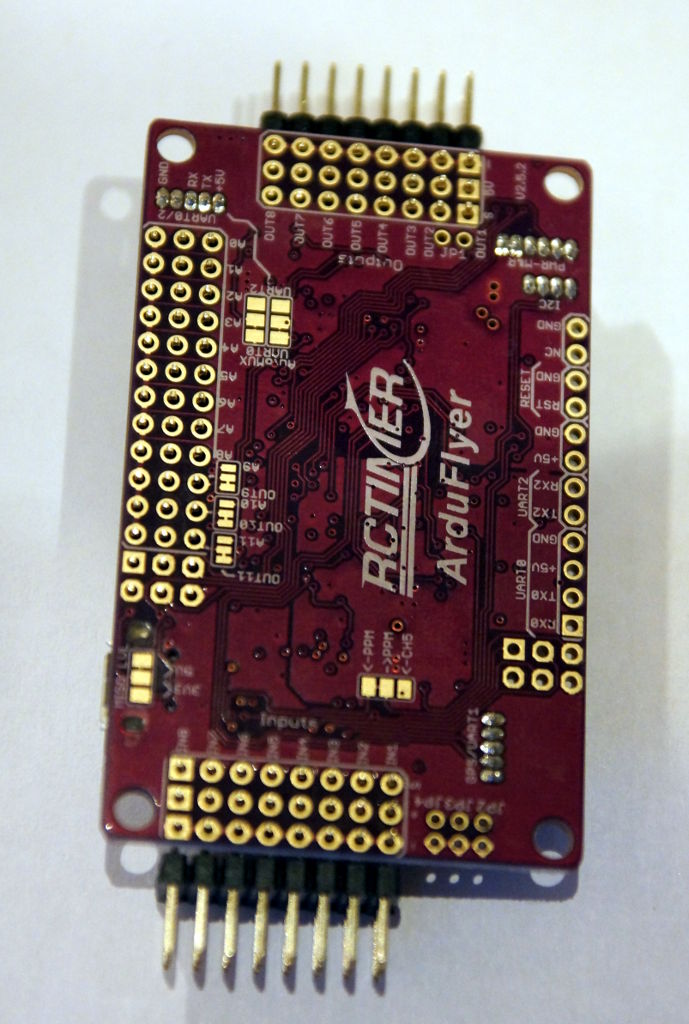 Саму плату перед монажом надо распаять. Точнее – распаять контакты, если это не сделано на заводе. В общем, к нашему ArduFlyer'у шло два набора RC- и серво-разъёмов. Один – с вертикальными контактами и второй – с горизонтальными. Выбор нужно делать по обстоятельствам. Я распаял горизонтальный. Потребуется только паяльная станция с острым жалом, тонкий припой типа ПОС-61 (диаметром 0.5 мм) и флюс. А ещё немного терпения – контактов на плате больше полусотни при её общем размере примерно 4×6 см.
Саму плату перед монажом надо распаять. Точнее – распаять контакты, если это не сделано на заводе. В общем, к нашему ArduFlyer'у шло два набора RC- и серво-разъёмов. Один – с вертикальными контактами и второй – с горизонтальными. Выбор нужно делать по обстоятельствам. Я распаял горизонтальный. Потребуется только паяльная станция с острым жалом, тонкий припой типа ПОС-61 (диаметром 0.5 мм) и флюс. А ещё немного терпения – контактов на плате больше полусотни при её общем размере примерно 4×6 см.
На плате нарисована белая стрелка, указывающая то место, которым вперёд коптер будет летать. И именно этой стрелкой надо установить плату в сторону того створа между лучами, который будет объявлен носом будущего летательного аппарата.
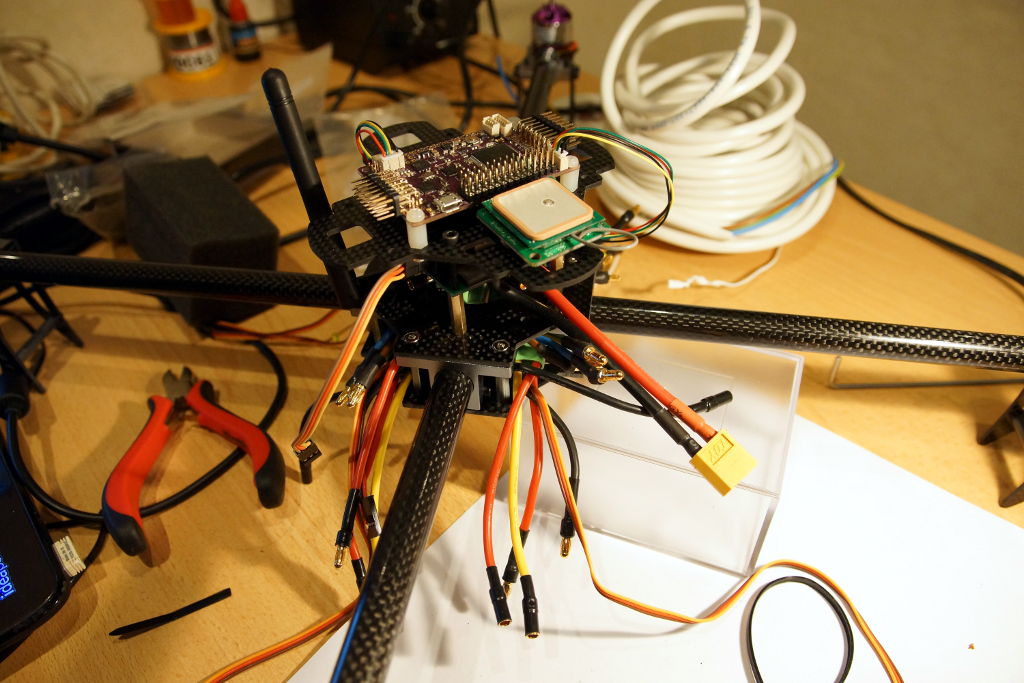
На верхней площадке прямо рядом с главной платой мы приклеили на двухстороннюю толстую липучку GPS-модуль, а в самом низу на ленты с велкро-липучками прикрепили аккумулятор.
В общем, всё, что потребуется для первого полёта, на своих местах.
Подключения
Для того, чтобы получить в голове цельное представление того, что мы хотим получить, я нарисовал такую вот картинку.

Следуя ей, делать всё было довольно просто.
Итак, удлинённые провода питания моторов с bullet-папами вставляются в bullet-мамы выходов ESC. Их как раз по три штуки. Каждый мотор – в свой ESC. Для начала можно соединить их с соблюдением цветов, но впоследствии придётся часть соединений поменять, так как пропеллеры должны будут вращаться в разные стороны.
У ESC есть входы высоковольтные и низковольтные (управляющие). Высоковольтные оканчиваются bullet-папами и вставляются в выходы платы распределения питания. Управляющие входы оканчиваются трёхконтактным серво-коннектором, который соединяется с разъёмом на ArduFlyer'е в соответствии со схемой выше. Тут три провода: коричневый и красный – BEC-питание, желтый – сигнальный, по которому плата будет управлять контроллером мотора. Если плата питается от отдельного UBEC или своего аккумулятора, то коричневый и красный провода можно откусить. Да и вообще можно откусить эти провода на трёх ESC, а оставить только на одном. Серво-коннектор следует подключать к полётной плате таким образом, чтобы жёлтый провод попадал на дальний от края контакт, а коричневый (или чёрный) – на крайний контакт на плате.


На плате распределения питания есть (кроме bullet'ов) ещё выход на двухконтактный серво-коннектор. Это очень удобно, так как от него можно запитать UBEC для радиоприёмника. Беда только в том, что вход UBEC'а не имеет никакого интерфейса – только два отдельных проводка. Поэтому нужно аккуратно вскрыть термоусадочную изоляцию UBEC'а, отпаять эти проводки и припаять к ним новый провод с серво-коннектором на конце. Отпаивать нужно аккуратно – припой бессвинцовый и его при пайке на жалели, греть нужно сильно и быстро.
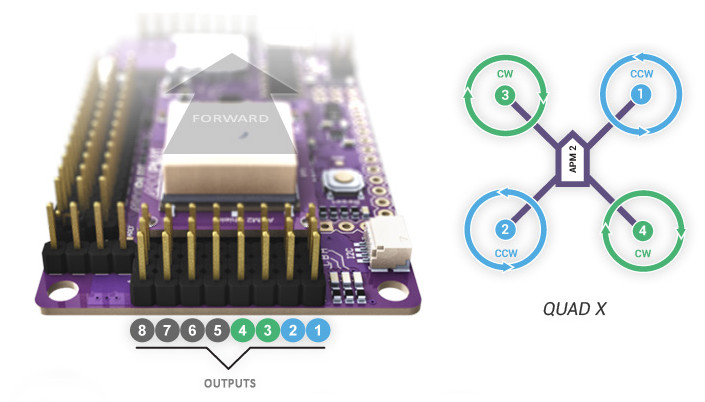
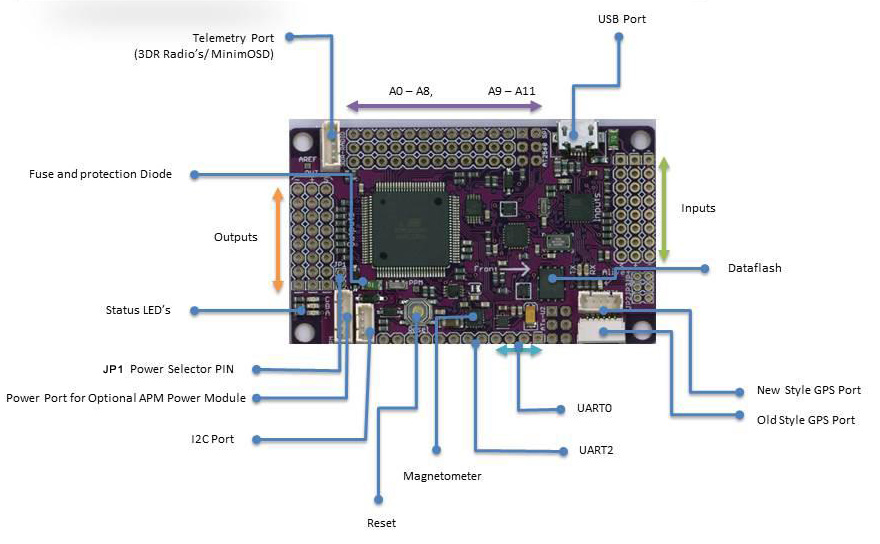
Тут, конечно, чтоит оговориться, что, мутя воду с UBEC'ом, мы не подумали, что приёмник можно спокойно запитать прямо от платы (а плату от BEC регуляторов). А это, как выяснилось, вполне возможно. Так что есть куда упрощать конструкцию. Для этого надо на плате поставить джампер JP1. Сам джампер, а также двухконтактный пин для распайки идёт в комплекте. Где он находится, можно поглядеть на вот этой картинке:
Тут стоит привести такое мнемоническое правило. Дело в том, что у ArduFlyer'а (и вообще у APM) есть два набора контактов: входные (inputs) и выходные (outputs). Эти понятия определяют направления управляющих сигналов, но что касается питания, при вставленном джампере JP1 всё точно наоборот – плата может сама питаться от выходов, но подавать напряжение на входы.
 Вот фотография контактов приёмника Turnigy 9X. Во вход питания вставляем выход UBEC'а. А каналы подключаем серво-коннекторами к полётной плате. Сбивает с толку тот факт, что 9X считается 9-канальной аппаратурой, но у приёмника всего 8 каналов. При этом трёхконтактных разъёмов у него 10 штук. Последние два – это входы для батареи и bind (привязывания) приёмника к передатчику. При биндинге в 9-й разъём ставляется петля, а в 10-й подаётся питание от батареи. Первые 8 разъёмов – это те самые каналы, из которых нам пока интересны первые 4 штуки (газ и три угла Эйлера):
Вот фотография контактов приёмника Turnigy 9X. Во вход питания вставляем выход UBEC'а. А каналы подключаем серво-коннекторами к полётной плате. Сбивает с толку тот факт, что 9X считается 9-канальной аппаратурой, но у приёмника всего 8 каналов. При этом трёхконтактных разъёмов у него 10 штук. Последние два – это входы для батареи и bind (привязывания) приёмника к передатчику. При биндинге в 9-й разъём ставляется петля, а в 10-й подаётся питание от батареи. Первые 8 разъёмов – это те самые каналы, из которых нам пока интересны первые 4 штуки (газ и три угла Эйлера):
- Roll, крен (опускание одной боковой стороны и подъём другой; движение влево-вправо)
- Pitch, тангаж (опускание или подъёма носа и кормы; движение вперёд-назад)
- Throttle, газ (скорость вращения моторов)
- Yaw, рысканье (повороты налево-направо)
При подключении трёхпроводными коннекторами надо следить за тем, чтобы жёлтые провода (сигнальные) были сверху, а чёрные или коричневые (минус) были снизу. Но лучше будет при возможности подключить сигнальные каналы однопиновыми коннекторами или сразу найти 8-пиновый или 4-пиновый шлейф (заметка на будущее).
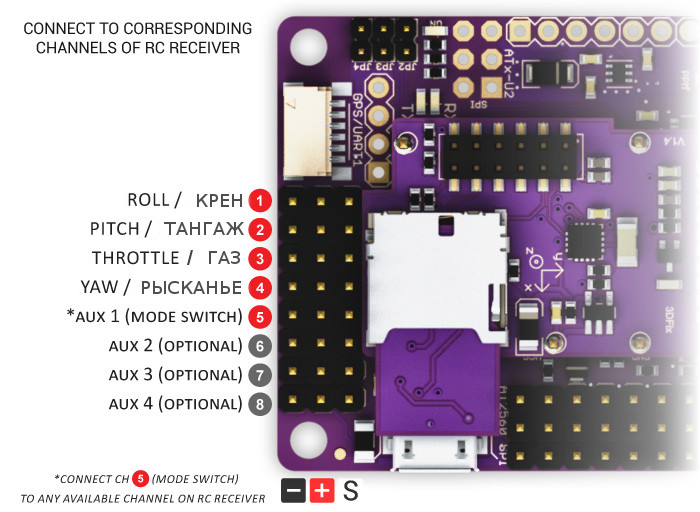
В соответствии с этой схемой выходы приёмника подключаются ко входам платы. Если приёмник установлен в правильном направлении, то каналы будут идти точно в одинаковой последовательности. Главное – следить за тем, чтобы сигнальные провода шли в дальний от края платы пин.
GPS-модуль легко подключается своим 4-контактным проводом к специальному входу на полётной плате. Картинку приводить не буду – на самой плате прямо так и написано: GPS. И после этого сборку можно считать завершённой. Останется только подключить маму XT60 от аккумулятора к папе XT60 платы распределения питания.

Tags: Beyond IT, R/C
Category:
R/C |
1 Comment »
25 May 2015 - 17:19
Здравствуйте ,.
Интересует вопрос компоновки регуляторов.
В вашем коптере они лежат пакетом .
Известно, что регуляторы греющийся элемент конструкции.
Насколько хорошо они охлаждаются в вашем варианте.? Не было ли случаев нештатных ситуаций из-за такого расположения регуляторов?